Model matematyczny jest pewnym odwzorowaniem rzeczywistego obiektu, a zachowanie obserwowane na tej podstawie jest w najlepszym przypadku aproksymacją jego działania. Jeżeli zapewni się wystarczającą dokładność odwzorowania, to model taki może być użyty jako substytut rzeczywistego obiektu do prowadzenia eksperymentów symulacyjnych i analiz. Dokładność odwzorowania można zapewnić nie tylko poprzez szczegółowy opis matematyczny, lecz także poprzez zebranie zestawu niezbędnych parametrów (masa, wymiary geometryczne, sztywność, tłumienie itp.) I tutaj zostaną przedstawione metody wyznaczania poszczególnych parametrów i charakterystyk, które następnie pozwolą na uzupełnienie modelu matematycznego.
Omówione dalej tematy są następujące:
Wyznaczanie położenia środka masy pojazduWyznaczanie siły przyczepności i oporu toczenia opon samochodowych
Charakterystyka techniczna pojazdu i jego identyfikacja
Wyznaczanie położenia środka masy pojazdu
Zanim jednak zostanie opisany sposób wyznaczania położenia środka masy pojazdu należy najpierw wyjaśnić czym jest środek masy pojazdu i czym różni się od środka ciężkości.
Zgodnie z definicją [2] środek ciężkości jest to punkt zaczepienia siły wypadkowej wszystkich sił ciężkości elementów układu lub wszystkich części bryły sztywnej. To oznacza, że do istnienia tej siły potrzebna jest grawitacja oraz że odnosi się ona jedynie do płaszczyzny.
Natomiast środek masy jest pojęciem ogólniejszym od pojęcia środka ciężkości, gdyż ciało ma środek masy zawsze i bez względu na to, czy znajduje się w polu ciężkości czy nie. Jest to teoretyczny punkt, którym można zastąpić dowolną bryłę lub układ brył, a po przyłożeniu siły do tego punktu o dowolnym kierunku i zwrocie suma statycznych momentów siły będzie równa zero (bryła nie będzie się obracała). Dodatkowo pojęcie to odnosi się już do przestrzeni, więc można wtedy mówić też o wysokości położenia środka masy, co jest też użyteczne w kontekście mechaniki ruchu pojazdów. W przybliżeniu przyjmuje się, że środek masy ciała znajduje się w tym samym miejscu, co środek ciężkości, jednak wyłącznie w przypadku płaszczyzny. Jeżeli jest mowa o układzie przestrzennym, to już nie można posługiwać się pojęciem środka ciężkości.
Znajomość położenia środka masy pojazdu jest niezbędna przy [1]:
- ocenie zachowania się pojazdu podczas hamowania i przyspieszania;
- obliczaniu zdolności pokonywania wzniesień;
- projektowaniu układów hamulcowych i układów napędu czterech kół;
- projektowaniu zawieszeń i analizie drgań;
- badaniu stateczności ruchu;
- wyznaczaniu momentów bezwładności.
Dla każdego z wymienionych przykładów korzystne jest niskie położenie środka masy, ponieważ pojazd zyskuje stabilność w każdych warunkach jazdy. Jednak położenie środka masy jest podyktowane warunkami konstrukcyjnymi, dlatego nie może być ono dowolne. Skoro już wiadomo do czego czego może być użyteczna informacja o położeniu środka masy, to można przejść do jego wyznaczania. Zanim przejdzie się do części pomiarowej, to najpierw należy odpowiednio przygotować pojazd, aby pomiary były wiarygodne. Dlatego pojazd powinien spełniać następujące warunki [3]:
- koła jezdne ustawione do jazdy na wprost,
- koła niezahamowane,
- silnik wyłączony,
- dźwignia zmiany biegów w położeniu neutralnym,
- mosty napędowe odłączone,
- blokady mechanizmów różnicowych wyłączone,
- pojazd w stanie gotowym do jazdy,
- zablokowane zawieszenie przed uginaniem się,
- minimalizacja ugięcia opony.
Również, aby zapewnić możliwie największą dokładność pomiarów należy zapewnić odpowiednie warunki badań [3]:
- wagi o dokładności pomiarowej nie mniejszej niż 0,5%,
- stosować zespół jednakowych wag,
- płaszczyzna pomiarowa powinna być twarda, pozioma i równa,
- dopuszczalna różnica poziomów między wagami to 20 mm,
- pomiary wykonane na wagach z ważnym świadectwem legalizacji,
- przed przystąpieniem do pomiarów wagi należy wytarować,
- pomiary wymiarów liniowych przeprowadza się z dokładnością +-2 mm.
W trakcie pomiarów warto stosować odpowiednie protokoły pomiarowe, aby zebrać wszystkie niezbędne wyniki potrzebne do dalszych obliczeń. W tym przypadku są to wartości odczytane z wag oraz rozstaw osi, kół oraz promień koła, a także wysokość na jaką została podniesiona oś pojazdu. Dzięki zastosowaniu systemu pomiarowego składającego się z czterech wag można uzyskać wszystkie wartości nacisków, które są potrzebne do obliczeń. Mając odpowiedni zestaw danych można przystąpić do wyznaczenia położenia środka masy pojazdu.
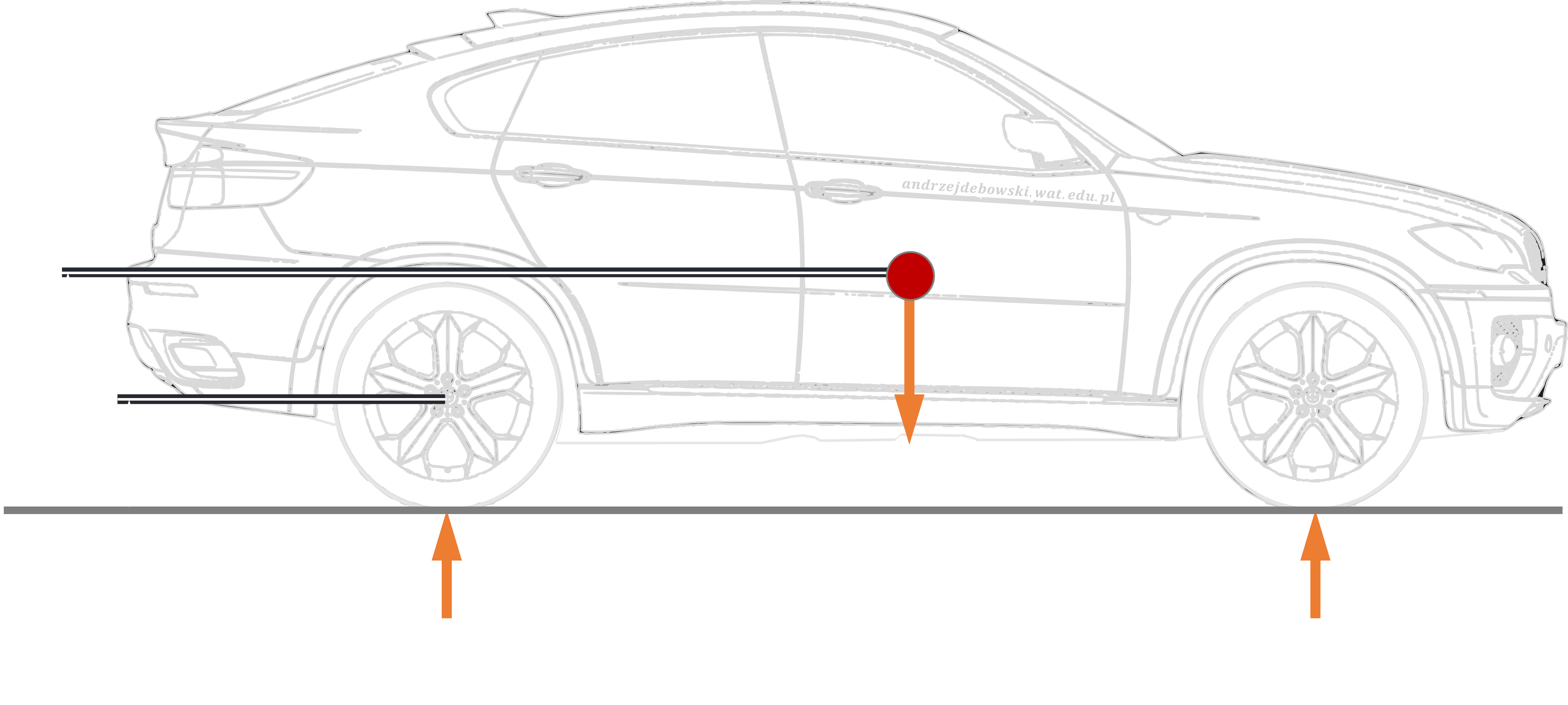
G - środek masy pojazdu (ciężar),
H - wysokość położenia środka masy,
R - promień koła,
L - rozstaw osi,
FT, FP - reakcja normalna (pionowa), będąca sumą nacisku koła prawego i lewego,
L1, L2 - odległość środka masy odpowiednio od osi tylnej i przedniej.
Dla pojazdu ustawionego jak na powyższym rysunku można wyznaczyć położenie środka masy w płaszczyźnie XY (płaszczyzna nawierzchni), co jest analogiczne do tego, jak wyznacza się środek ciężkości. Pod kątem modelu matematycznego jest on równoważny sztywnej belce mającej dwie podpory, a siła pionowa pod przednimi i tylnymi kołami może być określona za pomocą płaskich statycznych równań równowagi. Zapisując równanie momentów siły względem osi tylnego koła (również można względem przedniej osi) otrzymuje się:

Następnie po przekształceniach równanie przyjmuje postać:

Ostatecznie odległość środka masy od osi tylnej jest równa:
Natomiast od osi przedniej będzie to:
W identyczny sposób należy wyznaczyć położenie środka masy między kołami.
Aby obliczyć wysokość położenia środka masy pojazdu należy podnieść jedną z osi albo jeden z jego boków na wysokość W, co przedstawia poniższy rysunek.
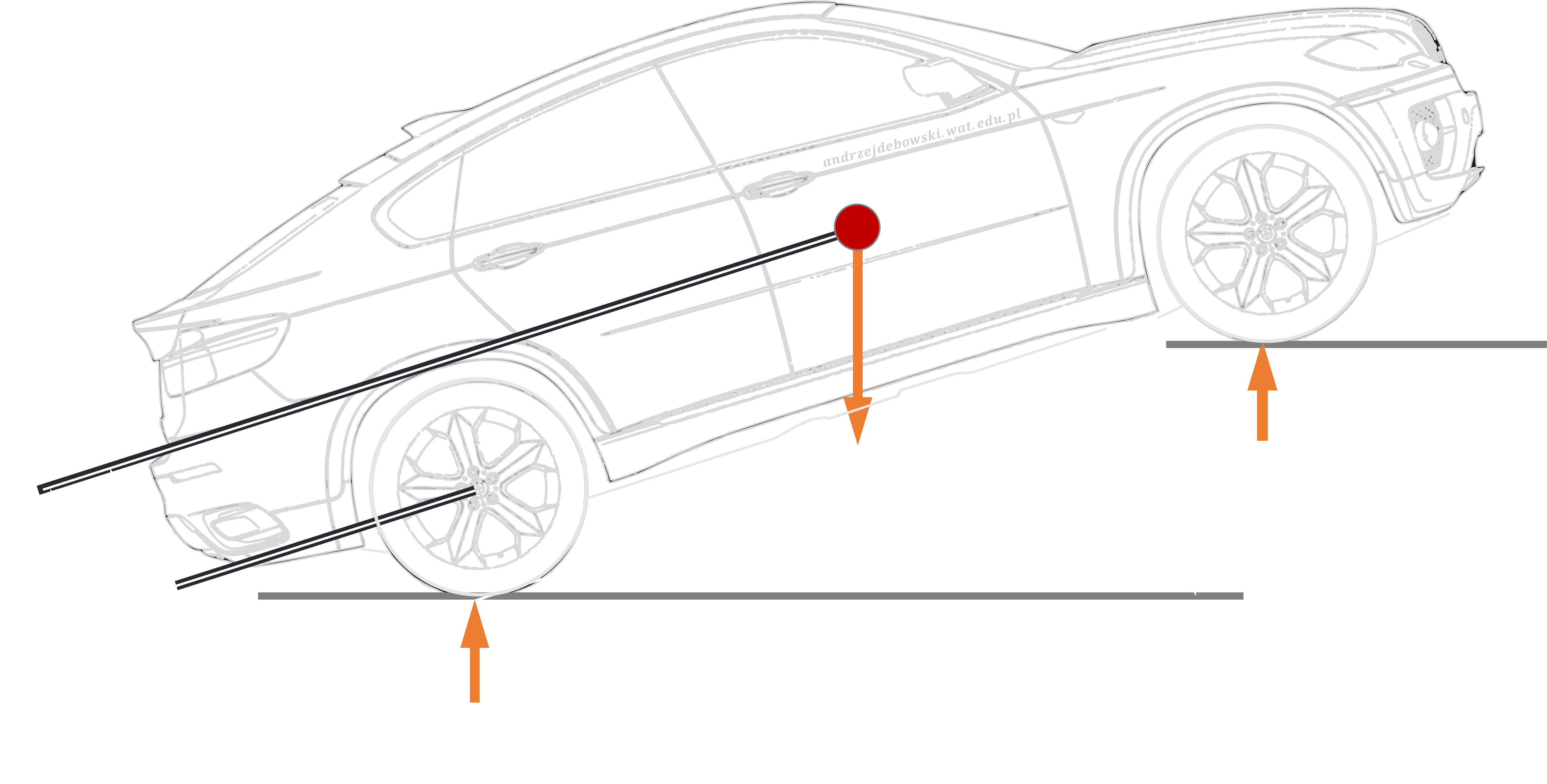
W - wysokość na jaką uniesiono przednią oś pojazdu,
H1 - wysokość środka masy nad osią pojazdu,
α - pochylenia pojazdu.
Podobnie jak poprzednio niezbędne jest zapisanie równania momentów siły względem wybranego punktu - w tym przypadku osi tylnego koła. Równanie to ma następującą postać:

Następnie czyniąc odpowiednie przekształcenia otrzymuje się kolejno:



Podstawiając teraz wartość L1, która została wyznaczona wcześniej do powyższego równania otrzymuje się:
Należy zaznaczyć, że FP i F P są różnymi wartościami, a kreska oznacza wartość mierzoną dla pojazdu ustawionego poziomo.
Konieczne jest również obliczenie wartości tgα, co można zrobić stosując twierdzenie Pitagorasa.
Teraz gdy już wiadomo, jak należy wyznaczać położenie środka masy można przejść do opracowania sprawozdania i omówienia otrzymanych wyników. Jednak to już każdy powinien zrobić we własnym zakresie.
Wyznaczanie siły przyczepności i oporu toczenia opon samochodowych
Najpierw trzeba zapoznać się z kilkoma podstawowymi pojęciami i odrobiną teorii, aby przystąpić do zajęć. I tak zgodnie z [5] opór toczenia (f) wyraża sumę strat energii, które powstają podczas ruchu kół pojazdu. Natomiast zgodnie z [6] współczynnik oporu toczenia jest to stosunek siły, jaką należy przyłożyć do osi koła, aby wywołać toczenie się koła ruchem jednostajnym po drodze poziomej, do prostopadłego nacisku koła na drogę.
Numer |
Rodzaj i stan nawierzchni drogi |
Współczynnika oporu toczenia f |
| 1. | Droga o twardej nawierzchni - beton i asfalt w dobrym stanie | 0,012 - 0,016 |
| 2. | Droga tłuczniowa (szosa) w dobrym stanie | 0,023 |
| 3. | Droga tłuczniowa pokryta grubą warstwa kurzu | 0,028 |
| 4. | Droga tłuczniowa zniszczona, wybita i zabłocona | 0,035 |
| 5. | Dobra droga polna — trakt | 0,035 - 0,05 |
| 6. | Droga błotnista lub piaszczysta | 0,08 - 0,16 |
| 7. | Sypki piasek | 0,15 - 0,3 |
Pomiędzy wartością poślizgu względnego a stosunkiem siły obwodowej do normalnego nacisku koła na drogę istnieje pewna określona zależność dla każdego rodzaju koła i drogi. Ta zależność wyrażona jest jako stosunek siły obwodowej do normalnego nacisku koła na drogę oznaczona symbolem μ - współczynnik przyczepności. Przez pojęcie siły obwodowej należy rozumieć siłę napędową przy ruchu koła po miękkiej drodze i siłę pędzącą przy ruchu koła po drodze o sztywnej nawierzchni.
Współczynnik ten można obliczyć za pomocą poniższych wzorów [7], zaś typowe wartości znajdują się w tabeli 2.
Numer |
Rodzaj i stan nawierzchni drogi |
Sucha |
Mokra |
| 1. | Beton | 0,8 - 1 | 0,5 - 0,6 |
| 2. | Asfalt | 0,7 - 0,8 | 0,3 - 0,4 |
| 3. | Klinkier | 0,7 - 0,8 | 0,4 - 0,5 |
| 4. | Droga tłuczniowa | 0,6 - 0,7 | 0,3 - 0,4 |
| 5. | Dobra gruntowa | 0,5 - 0,6 | 0,3 - 0,4 |
| 6. | Piasek | 0,5 - 0,6 | 0,4 - 0,5 |
| 7. | Droga oblodzona | 0,2 - 0,3 | 0,2 - 0,3 |
| 8. | Droga pokryta śniegiem | 0,2 - 0,3 | 0,2 - 0,3 |
Jak można zauważyć oba współczynniki związane są ze współpracą koła z jezdnią, z tym że współczynnik przyczepności dotyczy nawierzchni, a współczynnik oporu toczenia koła/ogumienia. Dodatkowo wzór, za pomocą którego możliwe jest obliczenie wspomnianych współczynników jest identyczny (siła wzdłużna/siła normalna). Różnica wartości obliczonych współczynników wynika z wartości siły wzdłużnej. Dla współczynnika przyczepności siła wzdłużna jest mierzona dla koła całkowicie zahamowanego, będącego w pełnym poślizgu, natomiast siła wzdłużna do obliczenia współczynnika oporu toczenia jest mierzona dla koła toczącego się, co opisano dalej. Metod pomiaru oporu toczenia jest kilka, które są określane przez normy ISO a mianowicie [6]:
- metoda holowania, czyli siły reakcji powstającej na styku koła z jezdnią;
- metoda momentu, czyli mierzona jest wartość momentu za pomocą bębna badawczego;
- metoda wybiegu, czyli rozpędzenie pojazdu do określonej prędkości i swobodnego jej wytracenia do zera;
- metoda mocy, czyli pomiar mocy dostarczanej do bębna badawczego;
- metoda hamowania, czyli hamowanie bębna badawczego.
Opory toczenia pojazdu najłatwiej wyznaczyć metodą holowania pojazdu badanego przez inny pojazd. Wtedy dwa pojazdy łączy się a pomiędzy nie montuje się czujnik siły. Pomiar należy wykonywać na poziomej nawierzchni (kąt α = 0), z prędkością nie przekraczającą 5 km/h, dzięki czemu wpływ oporów powietrza można pominąć.

FOT - siła oporu toczenia kół tylnych,
FOP - siła oporu toczenia kół przednich,
FH - siła holowania.
Siłę oporu toczenia wyraża się następująco:

gdzie:
FO - siła oporu toczenia,
G - ciężar pojazdu,
FNT - reakcja normalna (pionowa) od drogi kół tylnych,
FNP - reakcja normalna (pionowa) od drogi kół przednich,
f - współczynnik oporu toczenia.
Jak łatwo zauważyć wyznaczenie współczynnika oporu toczenia nie jest trudne, gdyż siła oporu toczenia jest zmierzona za pomocą czujnika siły, natomiast siła normalna odpowiada ciężarowi pojazdu. Należy jednak mieć na uwadze, że w ten sposób wyznaczona wartość uwzględnia nie tylko opory toczenia kół po nawierzchni, ale też opory mechaniczne układów napędowego i jezdnego. Na opór toczenia ma także wpływ:
- typ opony,
- profil opony,
- ciśnienie w ogumieniu,
- rodzaj i stan nawierzchni.
Charakterystyka techniczna pojazdu i jego identyfikacja
Charakterystyką techniczną pojazdu określa się zbiór informacji umożliwiających porównanie właściwości technicznych różnych typów pojazdów. W charakterystyce ujęte są informacje takie jak: podstawowe wymiary i masa pojazdu, informacje dotyczące zespołu napędowego, przyspieszenia osiągane przez pojazd, długość drogi hamowania oraz wiele innych. Podawane informacje zależą od tego, jakie cechy pojazdów będą porównywane.
Przykładowe dane pojazdów mogące stanowić charakterystykę techniczną pojazdu zamieszczono poniżej.
Samochody osobowe VOLKSWAGEN SCIROCCO III COUPE
Samochody ciężarowe VOLVO FH 16
Natomiast dane identyfikacyjne pojazdu, to zbiór informacji, dzięki którym można stwierdzić, że pojazd, który posiadamy jest rzeczywiście tym pojazdem. Podstawowym źródłem danych o pojeździe jest Vehicle Identification Number (VIN), który w zalezności od producenta może być umieszczony w różnych miejscach w pojeździe. Jednak dodatkowe oznaczenia na pojeździe można znaleźć m.in. na: reflektorach przednich i tylnych, kierunkowskazach, lusterkach wstecznych, szybach, pasach bezpieczeństwa, obręczach kół czy też na silniku.
Literatura:
[1] Reimpell J., Betzler J.: Podwozia samochodów. Podstawy konstrukcji. Wydawnictwo Komunikacji i Łączności, Warszawa 2004.
[2] ilf.fizyka.pw.edu.pl/podrecznik
[3] Norma Branżowa, Badania pojazdów samochodowych i przyczep. Pomiary mas i wyznaczanie położenia środka masy, BN-86/3615-14.
[4] Norma ISO 28580, Passenger car, truck and bus tyres — Methods of measuring rolling resistance — Single point test and correlation of measurement results, 2009.
[5] Prochowski L., Mechanika ruchu, Wydawnictwa Komunikacji i Łączności, Warszawa 2005.
[6] Habich E., Mechanika pojazdów samochodowych, Techniczny poradnik samochodowy, Warszawa 1956, s. 130-171.
[7] Mitschke M.: Dynamika samochodu. Napęd i hamowanie, WKŁ, Warszawa 1987, str. 42 i 65
{kind=link}