W zakresie pomiarów związanych z badaniami pojazdów doskonałą pozycją literatury na początek będzie książka pt.: S. Orzełowski, "Eksperymentalne badania samochodów i ich zespołów", WNT, Warszawa 1995. Natomiast więcej teorii związanej z pomiarami znajdziemy w książce "Miernictwo dynamiczne", R. Hagel, WNT, Warszawa 1975.
W wymienionych książkach jest wszystko bardzo dobrze opisane i usystematyzowane, jednak chcę tutaj opisać w możliwie najprostszy sposób to, co jest najważniejsze, aby móc świadomie i prawidłowo realizować pomiary oraz analizować ich wyniki.
Realizując pomiary konieczne jest rozróżnianie przetwornika i czujnika, aby poprawnie posługiwać się tymi określeniami. Przetwornik jest częścią składową czujnika, który umożliwia przetworzenie informacji o wielkości mierzonej (np. siły, prędkości i innych) na sygnał elektryczny. Takie przetworniki nazywa się przetwornikami elektrycznymi. Istnieją także przetworniki mechaniczne, ale tymi już nie będę się zajmował. Poniżej przedstawiona została klasyfikacja przetworników najczęściej stosowanych w czujnikach do badania samochodów i ich zespołów.

Jednak sam sygnał elektryczny niesie zbyt mało informacji i należy go odpowiednio odnieść do jednostek układu SI. Czyli konieczne jest skalowanie wartości, co oznacza zmianę jednostek z V na np. N czy też mm. Aby można było właściwie wyskalować sygnał potrzebna jest też podstawowa wiedza o działaniu czujników, którą też przybliżę dla najpopularniejszych z nich kończąc też właśnie sposobem skalowania wartości jakie są mierzone przy ich pomocy.
Czujnik siły
Przetworniki tensometryczne (potocznie zwane tensometrami), to podstawowy element każdego czujnika do pomiaru sił ściskających, rozciągających, naprężeń, a także wag elektronicznych. Zasada działania tensometru oporowego opiera się na właściwościach fizycznych drutu metalowego, polegających na zmianie rezystancji elektrycznej wraz ze zmianą długości. Drut oporowy (lub folia) nakleja się za pomocą specjalnego kleju na element odkształcający się i łączy się w mostek Wheatstone’a. Pełny układ mostka zawiera dodatkowo elementy kompensujące niekorzystne wpływy zmian temperatury.
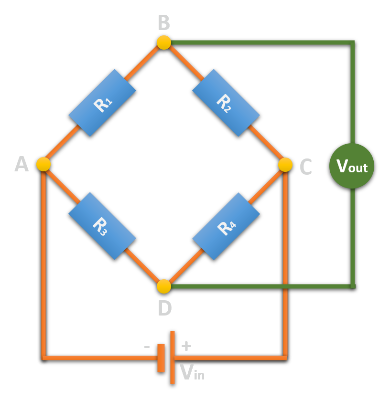
Mając połączony minimum jeden przetwornik tensometryczny i 3 rezystory pełniące rolę równoważących (kompensacyjnych) niezbędne jest podłączenie zasilania mostka zgodnie ze schematem, czyli do punktów A i C, a wtedy napięcie pomiarowe będzie można zmierzyć w punktach B i D. Jednak wartość tego napięcia jest niewielka, stąd też stosuje się wzmacniacze tensometryczne.
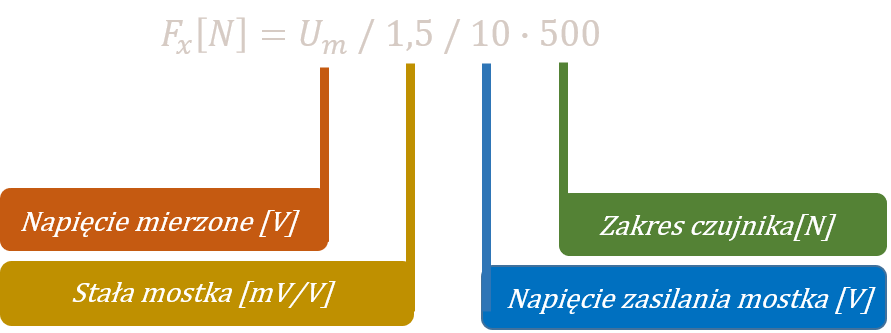
I teraz chcę wyjaśnić pokrótce w jaki sposób oblicza się siłę na podstawie napięcia zarejestrowanego z czujnika siły. Przykładowo dla mostka o stałej 1,5 mV/V przy nominalnym (maksymalnym) obciążeniu czujnika sygnał wyjściowy równa się 1,5 mV na każdy 1 V zasilania mostka. Czyli jeśli czujnik zasilany jest napięciem 10 V, to wyjściowe napięcie będzie zmieniało się w zakresie 0‒15 mV. Oczywiście w zależności od obciążenia mostka, który jest wewnątrz czujnika. Wartość zmian napięcia określana jest poprzez stałą mostka k wyrażaną w jednostkach mV/V. Oznacza to, że dla czujnika tensometrycznego o nominalnej sile 500 N i stałej 1,5 mV/V zasilanego napięciem 10 V, zmierzona wartość siły będzie wynosiła:
Przedstawione powyżej podejście jest bardzo wygodne, bo mając informacje o przetworniku możemy w szybki sposób obliczyć wartość siły jaka jest mierzona. Jednak jeśli nie mamy takich informacji jest też drugie rozwiązanie. Wystarczy wykorzystać odpowiedni wzorzec masy (odważnik) i sprawdzić o ile zmieni się napięcie wyjściowe, gdy wzrośnie obciążenie o ustaloną wartość. Wtedy już, gdy znamy napięcie wyjściowe dla nieobciążonego i obciążonego czujnika można za pomocą proporcji obliczyć współczynnik skalujący, o który trzeba pomnożyć każdą zmierzoną wartość napięcia. Pamiętać trzeba jednak o zakresie pracy czujnika, gdyż jego mechaniczne działanie wprowadza nieliniowość działania ze względu na histerezę.
Czujnik przemieszczenia
Jednym ze stosowanych do pomiaru przemieszczenia jest czujnik transformatorowy oznaczany też jako LVDT (ang. Linear Variable Differential Transformer). Jego podstawowym zespołem jest transformator różnicowy, który składa się z uzwojenia pierwotnego (czyli to, które jest zasilane) i dwóch uzwojeń wtórnych (czyli te, z których odbierany jest sygnał pomiarowy).
1 - ruchomy pręt pomiarowy, 2 - obudowa czujnika, 3 - karkas, 4 - cewka uzwojenia wtórnego, 5 - cewka uzwojenia pierwotnego, 6 - rdzeń magnetyczny, 7 - cewka uzwojenia wtórnego
Uzwojenia wtórne są symetrycznie nawinięte względem uzwojenia pierwotnego (są takie same po obu stronach uzwojenia pierwotnego na cylindrycznym karkasie (korpus cewki elektrycznej wykonany z materiału izolacyjnego). Wewnątrz karkasu porusza się rdzeń magnetyczny, będący częścią pręta, który realizuje pomiar przemieszczenia/długości. Uzwojenie pierwotne zasilane jest napięciem prądu zmiennego o stałej i określonej amplitudzie i częstotliwości. Powoduje ono, że w uzwojeniach wtórnych indukują się napięcia o różnej amplitudzie i przeciwne w fazie. Wyjątkiem oczywiście jest tutaj położenie środkowe rdzenia w stosunku do uzwojeń wtórnych, gdyż wtedy napięcie na wyjściu wynosi zero, a transformator jest zrównoważony. Przesunięcie rdzenia od położenia środkowego powoduje rozrównoważenie transformatora i na jego wyjściu pojawia się napięcie proporcjonalne do wielkości przesunięcia. W każdym położeniu rdzenia (poza punktem zerowym) powstaje różnica napięć na wyjściu transformatora, która w zakresie pracy przetwornika jest liniowo proporcjonalna do przesunięcia rdzenia. W trakcie przesuwania rdzenia z jednego skrajnego położenia w drugie, podczas przejścia przez zero zmienia się faza napięcia. Ponieważ rdzeń nie ma żadnego połączenia mechanicznego z cewką transformatora, elementy te nie ulegają zużyciu. Brak tarcia umożliwia długotrwałą, precyzyjną pracę. Tak skonstruowany przetwornik nie posiada histerezy. Ponieważ nie występuje żadne mechaniczne obciążenie w pracy przetwornika, jego wytrzymałość, niezawodność i powtarzalność jest bardzo wysoka.
Skalowanie tego czujnika odbywa się podobnie do czujnika siły z tym, że w teraz jest potrzebny wzorzec długości. Mając wartość napięcia przy zerowym początkowym położeniu pręta pomiarowego umieszcza się między nim a powierzchnią badaną wzorzec długości. Dzięki temu za pomocą proporcji można obliczyć współczynnik skalujący, o który trzeba pomnożyć każdą zmierzoną wartość napięcia.
Czujnik przyspieszenia
Czujniki przyspieszeń służą do pomiarów drgań i można tu wyróżnić czujniki pod względem zasady ich działania, a mianowicie: piezoelektryczne, ADXL, wiroprądowe i laserowe.
ADXL
Przetwornik zawiera międzypalczasty kondensator różnicowy. W układzie ADXL ma on konfigurację lateralną (poziomą) zrealizowaną w technice mikromechaniki powierzchniowej w polikrzemie.
Skalowanie można wykonać dwojako, a mianowicie statycznie lub dynamicznie.
Skalowanie statyczne jest możliwe jeżeli czujnik jest czuły na przyspieszenie ziemskie. Aby wyznaczyć żądaną wartość należy ustawić zwrot jednej z osi równolegle do kierunku działania siły grawitacji i zapisać zmierzoną wartość. Siła grawitacji jest w tym przypadku wzorcem. Następnie należy obrócić czujnik o 180° i ponownie zanotować zmierzoną wartość. Teraz wiadomo, że różnica pomiędzy dwoma wartościami wynosi dokładnie 2 g.
Posługując się poniższymi wzorami można otrzymać wzmocnienie lub czułość czujnika wyrażone w jednostce [g]. Jeżeli chcemy mieć wartości odniesione do układu SI, to końcowy wynik należy pomnożyć o 9,81 [m/s2].
Czułość czujnika przyspieszenia:

Wzmocnienie czujnika przyspieszenia:

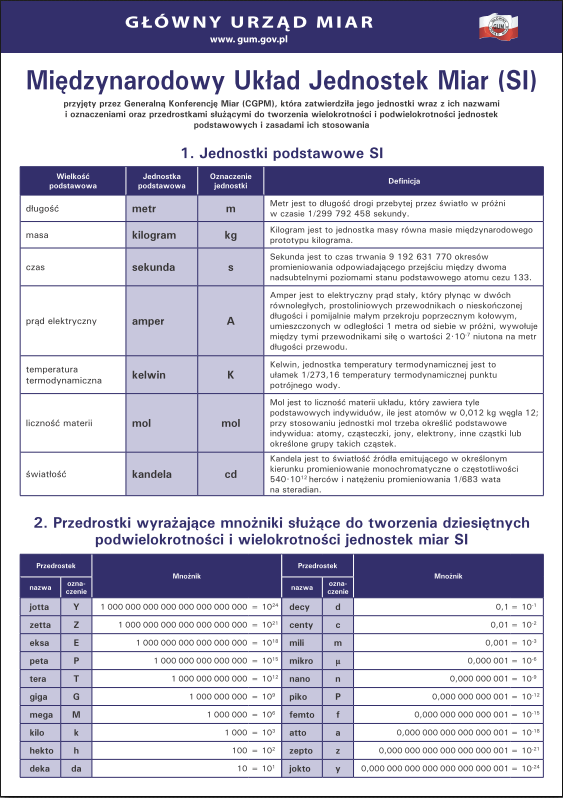
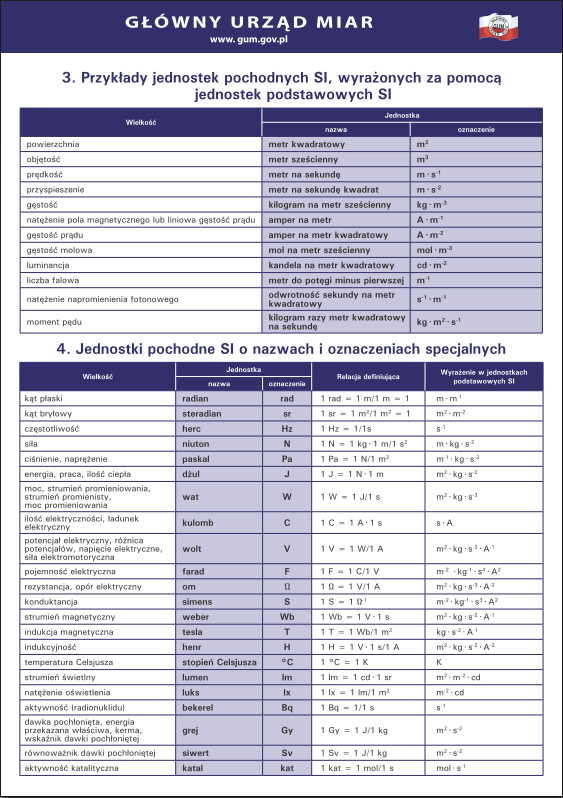
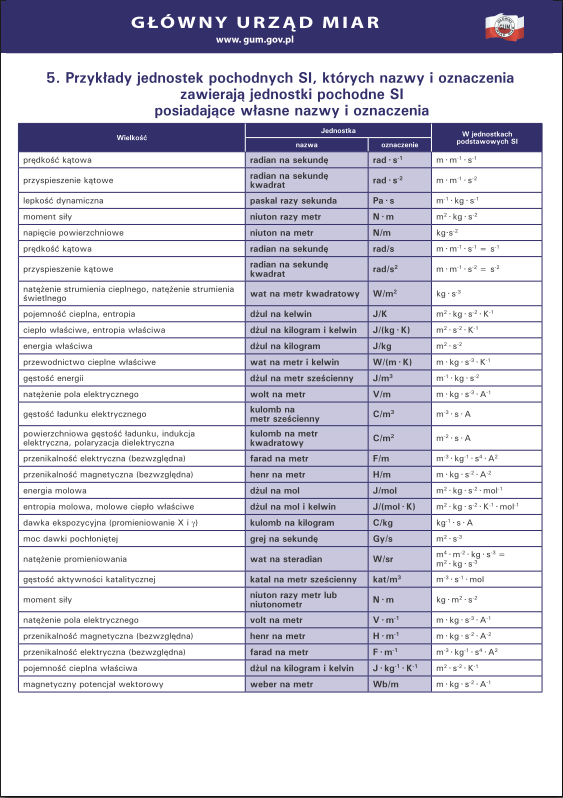
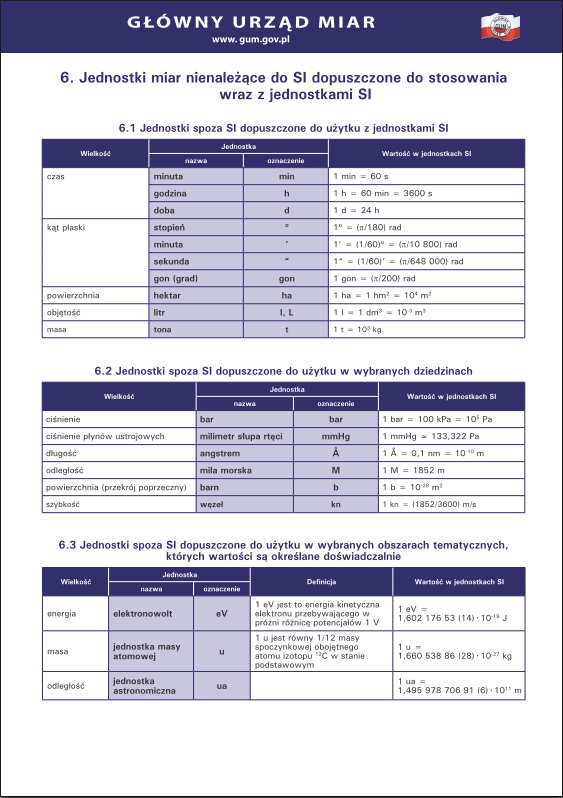
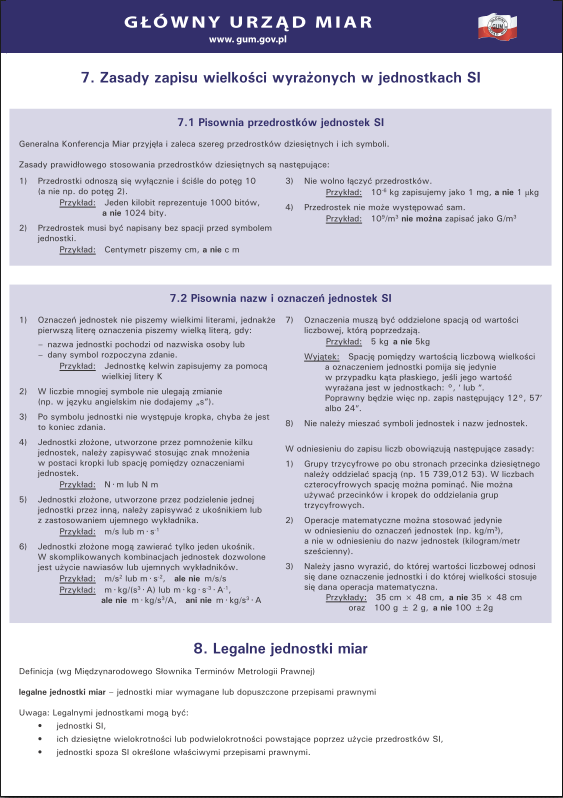
Jednostki podstawowe układu SI
Jak już zmierzone zostały wartości to należy przedstawić je zgodnie z obowiązującym międzynarodowym układem jednostek i miar (SI). Generalna Konferencja Miar (CGPM), przyjęła i zatwierdziła te jednostki wraz z ich nazwami i oznaczeniami, a także przedrostkami służącymi do tworzenia wielokrotności i podwielokrotności jednostek podstawowych oraz zasadami ich stosowania. Informacje te zostały zestawione przez Główny Urząd Miar na planszach zamieszczonych poniżej i dostępnych na stronie GUM. Swoją drogą warto też odwiedzić stronę GUM, aby zobaczyć czym się zajmują. [1]
{kind=link}